 Transition State Search Algorithms: Ridge and cNEB Methods
Transition State Search Algorithms: Ridge and cNEB MethodsTransition State Search Algorithms: Ridge and cNEB Methods
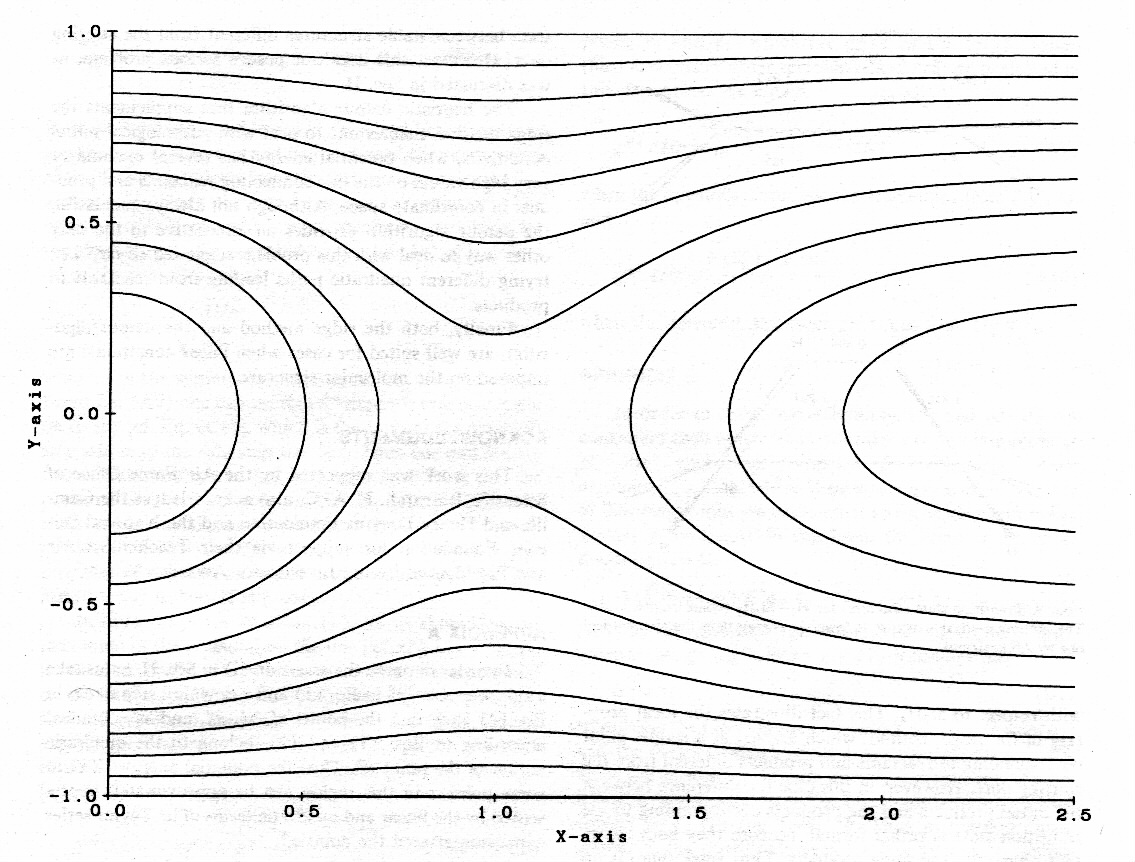
Transition State Searching

 Initial State à
MEP à
Final State
Initial State à
MEP à
Final State
MEP = minimum energy path, which can have several maxima and minima
Why search for transition states?
Search Algorithms - Basic
The Drag Method:
 Fix a drag coordinate, and relax all other degrees of freedom to minimize total E.
Fix a drag coordinate, and relax all other degrees of freedom to minimize total E.
Then, follow drag coordinate and drag from R to P.
Inverted force determines propagation direction.
Problem:
selected drag coordinate may not lead to saddle point.Better Search Algorithms
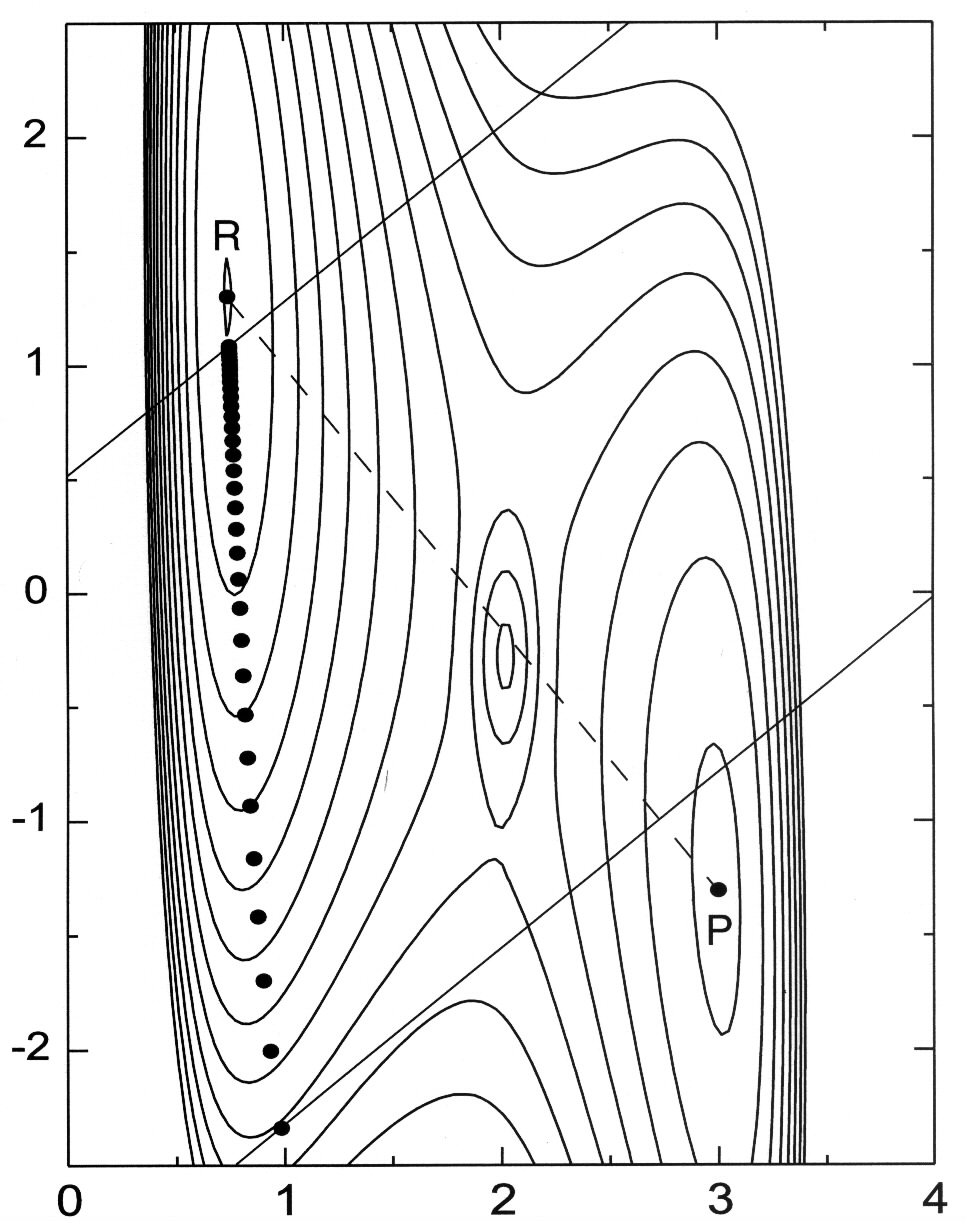
The Ridge Method:
![]()
![]()
![]()
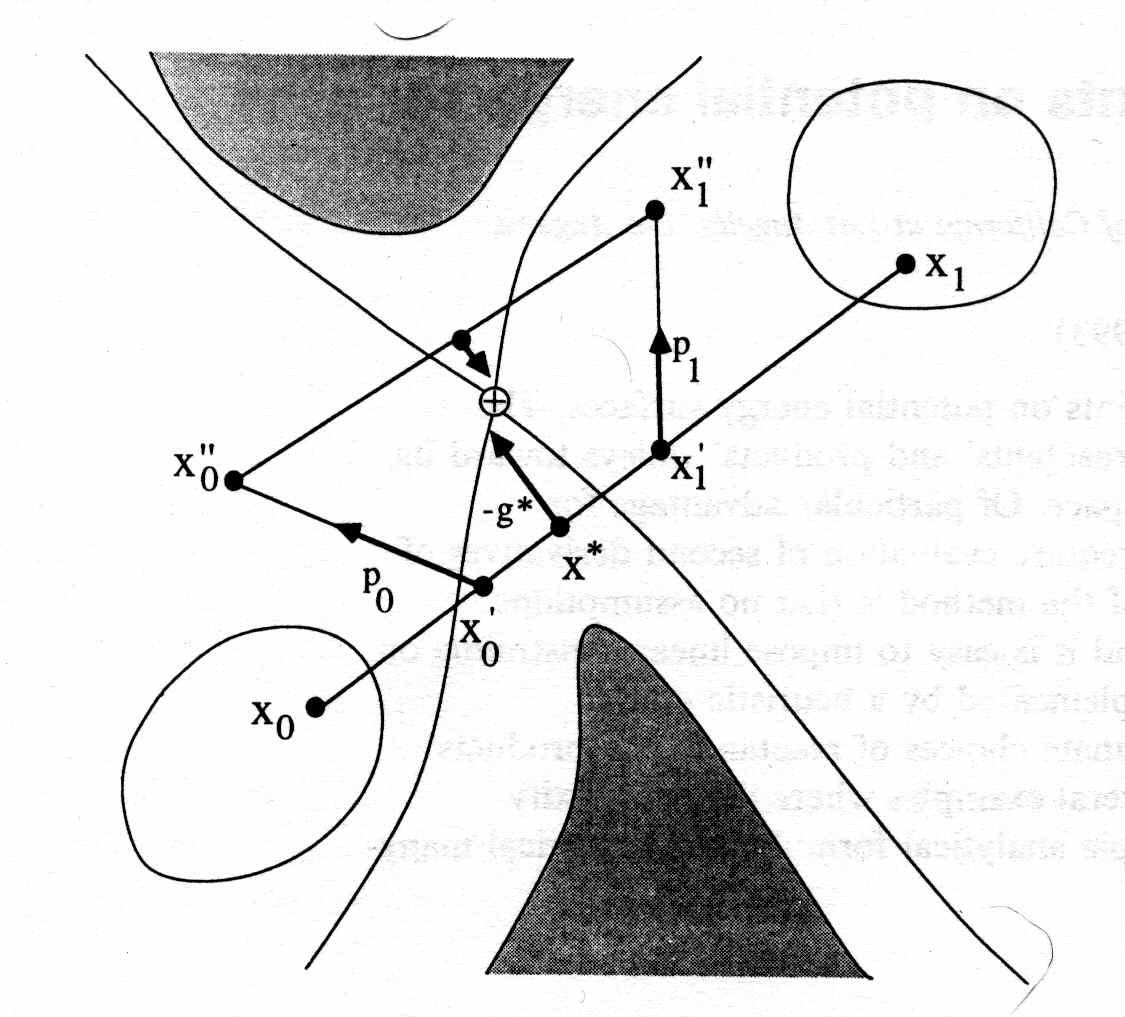 Interval:
Interval:
![]()
![]()
![]() downhill steps:
downhill steps:
![]()
![]() check for max on:
check for max on:
![]() and check that it’s
and check that it’s
Then, repeat until gradient at x* is sufficiently small.
Problems:
converges quickly to saddle point vicinity, but steps get smaller as we get closer, and halts or requires many iterations to reach high tolerance.
Other Search Algorithms
 Nudged Elastic Band (NEB):
Nudged Elastic Band (NEB):
Spring-connected images form the R-P pathway.
 Minimize an object:
Minimize an object:
![]() But images tend to cut corners and slide downhill, so ‘nudge’:
But images tend to cut corners and slide downhill, so ‘nudge’:
For each image: calculate E, gradients, tangent; nudge w/force projection, minimize the system
Problems:
saddle point needs to be estimated from images Climbing Image NEB (cNEB):
Climbing Image NEB (cNEB):
Highest-energy image climbs up to the saddle point.
How it’s done:
The highest-energy image then converges to the saddle point, and no interpolation is required.
Also, the MEP is obtained without extra effort.
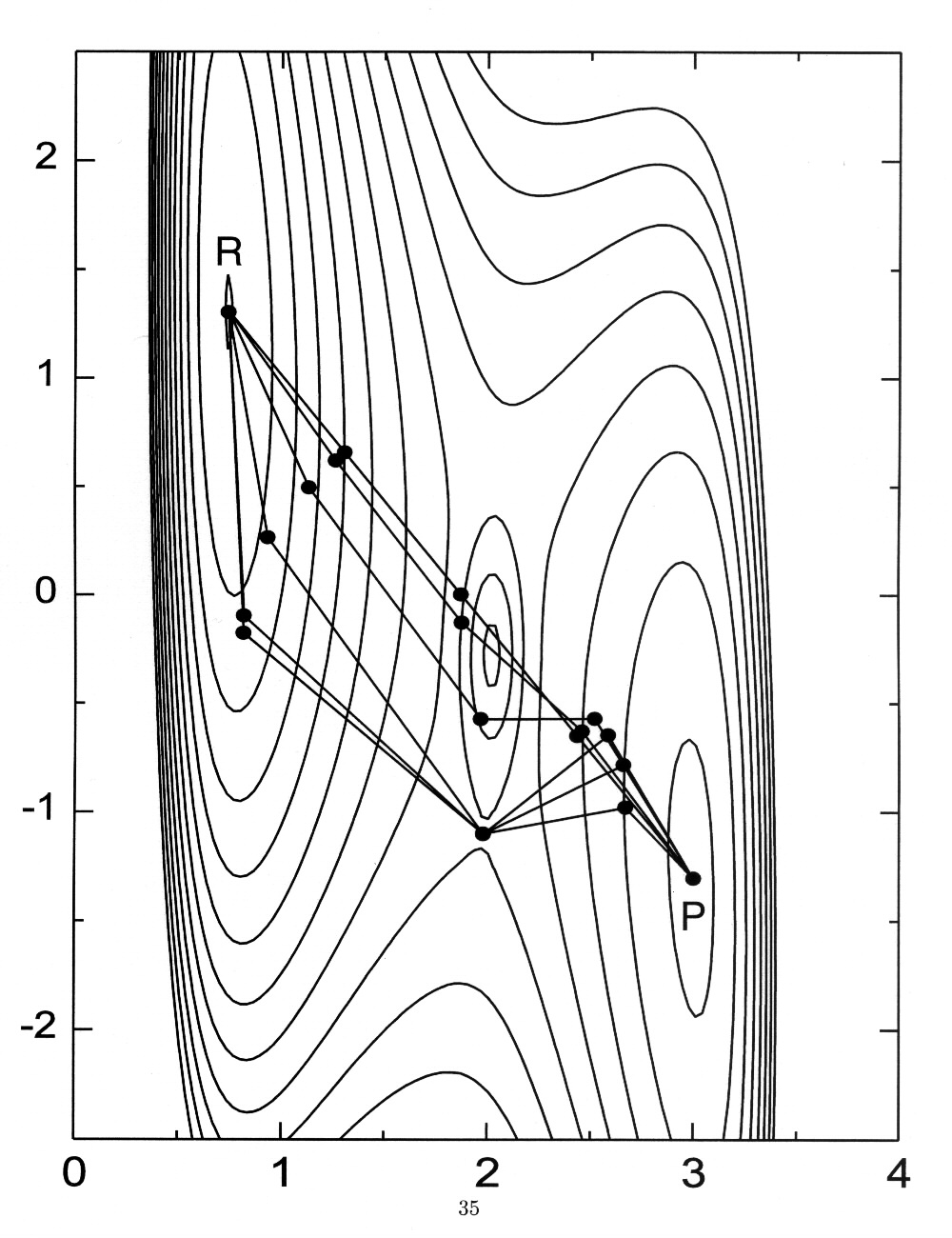
Approach
Observations:
Computational effort (# of force evaluations) for Ridge is lower for low convergence tolerance, but increases rapidly for higher tolerance.
cNEB does not suffer this problem as much.
Implementation:
Start with Ridge à switch to cNEB
Both codes only require the energies and the gradients to proceed (not the Hessian), so can be implemented within the same DFT code (VASP).
Efforts:
Benchmark each code separately.
Find an optimal switching tolerance or code-in a self-tuning one.